前言
目录
-
Learning Representations in Model-Free Hierarchical Reinforcement Learning
-
Hierarchical Deep Reinforcement Learning Integrating Temporal Abstraction and Intrinsic Motivation
-
REINFORCEMENT LEARNING WITH ANTICIPATION: A HIERARCHICAL APPROACH FOR LONG-HORIZON TASKS
Learning Representations in Model-Free Hierarchical Reinforcement Learning
论文的研究动机是通过引入 HRL 来解决 RL 面对具有 Sparse Reward 的问题表现不佳的问题(个人感觉这是在使用另一种方式去解决 NeSy 方法在做的事情,都是引入抽象的特征表示)
Method
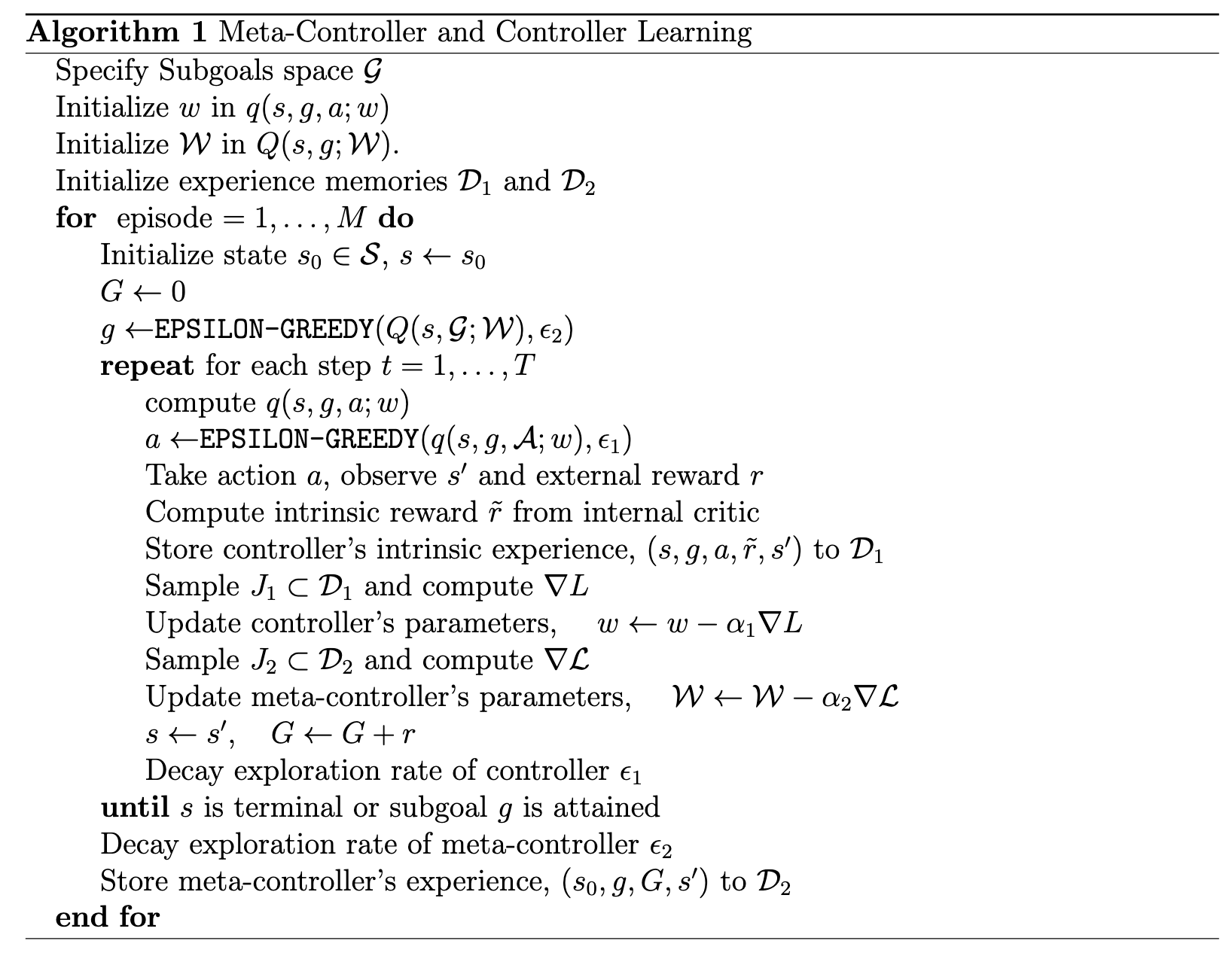
论文采用的方法框架由一个生产 sub goal 的 Meta-Controller 和一个解决 sub goal 的 Controller 组成
在时间 t 时,Meta-Controller 接收环境状态 $s_t$ 并选择一个 sub goal $g_t \in \mathcal{G}$ ,Controller 接收环境状态 $s_t$ 和 sub goal $g_t$ 并选择一个动作 $a_t$
对于 controller,它的奖励函数可以表示为
$$ G_t = \sum_{k=t}^{t + T} \gamma^{k-t} r'_{t}(g) $$其中 $r'_t(g)$ 是一个内部奖励函数,文章中似乎用来衡量 sub goal 是否达成
同样,对于 meta-controller,它的奖励函数可以表示为
$$ G_t = \sum_{k=t}^{t + N} \gamma^{k-t} r_k $$从定义中也可以推断出,当我们设计 Q 函数时,Controller 的 Q 函数需要考虑 sub goal 的影响,可以表示为 $Q_1(s, a, g)$;而 Meta-Controller 的 Q 函数则可以简单的表示为 $Q_2(s, g)$ (将 g 看作 Meta 层面的动作)
如果我们将神经网络的参数用 $\mathcal{W}$ 来表示的话,两种 Controller 的 loss function 可以表示为
$$\mathcal{L}_{meta}(\mathcal{W}_1) = \mathbb{E}_{s, g, G, s'} \left[ \left( G + \gamma \max_{g'} Q_1(s', g'; \mathcal{W}_1) - Q_1(s, g; \mathcal{W}_1) \right)^2 \right]$$$$\mathcal{L}_{controller}(\mathcal{W}_2) = \mathbb{E}_{s, g, a, r', s'} \left[ \left( r' + \gamma \max_{a'} Q_2(s', g, a'; \mathcal{W}_2) - Q_2(s, g, a; \mathcal{W}_2) \right)^2 \right]$$其中 $G$ 是 Meta-Controller 的回报
整个算法的流程图如下:
补充:作者在后面提到的 Intrinsic Motivation Learning 感觉是一个 reward hacking 的方法,并不具有普适性和特别的创新点
再补充:纯诈骗犯啊我服了,轻轻的一句 “For now, we assume that the subgoal, g ∈ G, is provided by an oracle (standing in for the meta-controller), and we focus only on learning to achieve this subgoal.” 就把如何设计 sub goal 的问题给带过了 😂 (不是,标题中写的清清楚楚的 Learning representations 跑哪去了)
Hierarchical Deep Reinforcement Learning Integrating Temporal Abstraction and Intrinsic Motivation
文章提出 h-DQN (Hierarchical Deep Q-Network) 来解决 RL 中的 Sparse Reward 问题
Method
h-DQN 由两个层次的 RL 组成,Meta-Controller 和 Controller,Meta-Controller 负责选择 sub goal,Controller 负责执行 sub goal
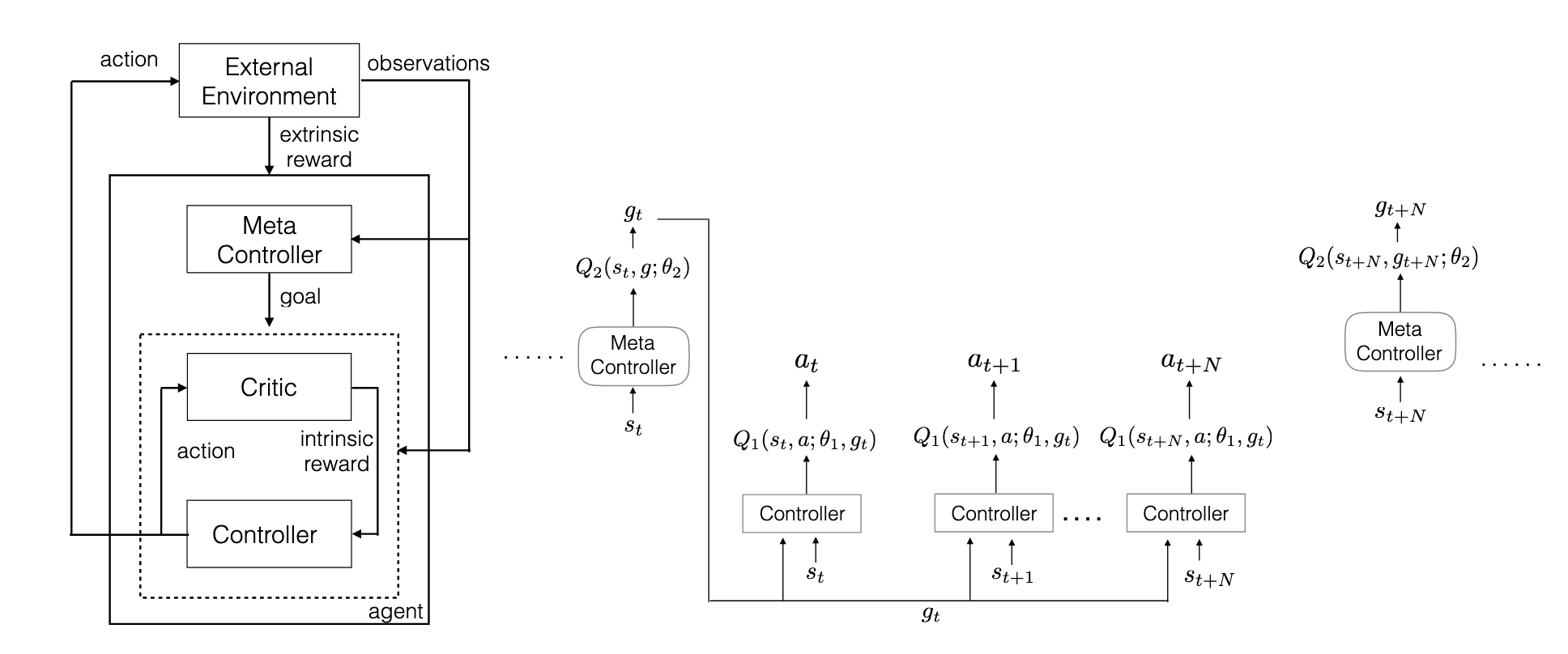
论文核心方法上面的图片就展现了出来,Meta-Controller 和 Contorller 更新的时间尺度是不一样的
Loss Function Meta-Controller 的 loss function 为
$$\mathcal{L}(\theta) = \mathbb{E}_{(s, g, G, s')} \left[ \left( G + \gamma \max_{g'} Q_1(s', g'; \theta) - Q_1(s, g; \theta) \right)^2 \right]$$Controller 的 loss function 为
$$\mathcal{L}(\theta) = \mathbb{E}_{(s, g, a, r, s')} \left[ \left( r + \gamma \max_{a'} Q_2(s', g, a'; \theta) - Q_2(s, g, a; \theta) \right)^2 \right]$$REINFORCEMENT LEARNING WITH ANTICIPATION: A HIERARCHICAL APPROACH FOR LONG-HORIZON TASKS
论文链接 作者是 Yang Yu 老师,LAMDA 实验室的重要成员,也是 RL 领域的国内大牛
HRL 方法的提出,本意是为了解决复杂的长时程任务中,因为稀疏奖励导致 RL 训练困难的问题,然而这种方法却引入了新的问题
- 如何设计有效的 sub goal,人工设计无法实现迁移,而自定发现的方法很难保证效果
- HRL 的训练过程存在显著的不稳定,高层底层同步修改,会带来非平稳的“移动目标”问题
- 训练得到的最终效果差,究竟是是 High level 的 goal policy 差,还是 lower level 的 executor policy 的问题?
论文针对上述问题,给出了 RLA (reinforcement learning with anticipation) 框架
background
论文的基础是无折扣价值函数的计算,采用的是 Goal-Conditioned Markov Decision Process (GMDP) 的框架,定义如下:
$$ Goal : \pi^* = \arg\max_{\pi} \mathbb{E}_{\tau \sim \pi(\cdot|s,g)} \left[ \sum_{t=0}^{H-1} R(s_t, a_t,g) \right] \quad \forall g \in \mathcal{G} \quad \forall s \in \mathcal{S} $$其中 $\tau$ 是一个 trajectory,$R(s_t, a_t, g)$ 是一个 reward function,$H$ 是 episode 的 horizon
奖励函数的设计如下
$$ Sparse Reward : R(s_t, a_t, g) = \begin{cases} 0 & \text{if } s_{t+1} = g \\ -1 & \text{otherwise} \end{cases} $$Method
在继续介绍论文方法之前,需要先回顾一个概念,对于范数的性质,有一点非常重要那就是
$$ \|x + y\| \leq \|x\| + \|y\| $$之前的前置条件已经提到,论文中对于 Value function 的计算方法是无折扣的形式,那么对于一个 trajectory $\tau$,它的 return 可以表示为
$$ V^{\pi}(s, g) = \mathbb{E}_{\tau \sim \pi(\cdot|s,g)} \left[ \sum_{t=0}^{H-1} R(s_t, a_t,g) | s = s_0 \right] $$那么结合之前讲述的范数性质,如果说起始状态为 s 终止状态为 $s_g$ ,那么可以得到对于中间提出的 Sub state $\hat{s}$,三个点自然满足三角不等式,且由于之前的奖励函数设计,我们可以发现 $V*(s,s_g) = -d(s,s_g)$ 且 $d(s,s_g) \leq d(s,\hat{s}) + d(\hat{s},s_g)$
根据上述结论可以得到
$$ V^*(s, s_g) \geq V^*(s, \hat{s}) + V^*(\hat{s}, s_g) $$